如何為汽車高級駕駛輔助系統(ADAS)中不同類型的雷達感測器應用選擇電路資料
在未來的某一天,自動駕駛汽車可能會比現時駕駛員駕駛的機動車更安全。 但在駕駛員開始鬆開方向盤之前,一些電子功能部件必須成為商用車的標準功能,包括毫米波雷達系統、監視器和/或雷射雷達。 需要各種電路資料。 與公路相比,雷達似乎更容易與戰場聯系在一起。 但它正在穩步成為一種非常可靠的感測器科技,作為現代汽車高級駕駛輔助系統(ADAS)科技的一部分,為現代商用車提供電子安全功能。 毫米波雷達系統是汽車工業中一種成熟的科技。 作為首個主動安全功能制動輔助系統,它自1996年起被梅賽德斯-賓士使用,現時常用於現代ADAS系統。 盲點檢測和防撞保護。
毫米波雷達將幫助自動駕駛汽車成為可能,但它們需要多種元件的組合,包括可以為電子設備和頻率高於77 GHz的電路提供穩定效能的電路資料。 例如,在ADAS應用中,電路資料需要設計能够支持24,77(或79)GHz的微波和毫米波訊號的傳輸線,以實現最小的損耗,同時在寬的工作溫度範圍內提供一致的可重複效能。 幸運的是,Rogers可以為這種電路資料提供從微波到高頻毫米波頻帶的ADAS應用所需的一致效能。
作為車輛ADAS系統電子感知保護的一部分,車載雷達系統將與其他科技一起使用。 雷達系統以無線電波的形式發送電磁(EM)訊號,並從目標(如另一輛汽車)接收無線電波的反射訊號,目標通常是多個目標。 雷達系統可以從這些接收到的反射訊號中選取相應的目標資訊,包括其位置、距離、相對速度和雷達截面(RCS)。 範圍(R)可以基於光速(c)和訊號所需的往返時間(Í)來確定。 往返時間是無線電波從雷達能量源(雷達發射機)傳播到目標,然後返回雷達能量源的時間。 在車載雷達系統中,雷達訊號的出現被傳輸到PCB天線。 R的值可以通過一個簡單的數學公式獲得,即光速和從雷達信號源到目標再回到雷達源的往返傳輸時間的乘積除以2:R=cÍ/2。
作為ADAS主動安全的一部分,該車配備了各種感測器,包括監視器、雷射雷達和雷達系統
圖1:作為ADAS主動安全的一部分,車輛配備了各種感測器,包括監視器、雷射雷達和雷達系統。
當多個雷達目標相對較近時,例如擁堵道路上的兩輛車,需要精確的雷達距離分辯率來區分檢測到的目標。 較短的雷達脈衝可用於檢測目標,儘管較短的脈衝或任何類型的訊號將較少的能量從目標反射回雷達接收器。 通過使用脈衝壓縮,可以將更多的能量添加到較短的脈衝中,其中相位或頻率調製可以新增其功率水准。 囙此,基於調頻連續波(FMCW)訊號(也稱為“線性調頻”訊號)的雷達通常用於車輛雷達系統。
目標速度的估計可以通過多普勒效應來實現,多普勒效應是指根據目標相對於雷達發射器/接收器的移動,從雷達獲得的目標反射的訊號的頻率變化。 都卜勒頻移與波長成反比:根據雷達目標距離雷達源是近還是遠,其值為正或負。
FMCW或線性調頻雷達系統可以量測多個目標的速度、距離和角度。 儘管工作在24GHz的窄帶(NB)和超寬帶(UWB)FMCW雷達已經被廣泛使用,但該頻帶的應用正在逐漸减少。 具有1GHz頻寬的窄帶77GHz雷達系統越來越多地用於車輛安全系統。 此外,汽車行業正在研究用於未來應用的UWB 79 GHz雷達。 連續波雷達相對簡單,可以檢測目標的速度,但不能檢測目標的距離。 脈衝連續波雷達還可以使用多個都卜勒頻率來估計距離。 脈衝持續時間和脈衝重複頻率是設計可靠脈衝連續波雷達系統的兩個關鍵參數。
由於脈衝壓縮,FMCW雷達的距離分辯率與FMCW訊號的頻寬成反比,與脈衝寬度無關。 短距離FMCW雷達使用UWB波形以高解析度量測小距離。 都卜勒分辯率是脈衝寬度和用於估計的脈衝數量的函數。 任何雷達系統中的雜波都是由感興趣目標以外的物體反射的雷達訊號產生的雜訊。 在任何雷達系統中,與周圍的其他物體相比,雷達必須從雷達訊號照射的許多物體中識別有效目標。
車載電子安全系統使用其他物理參數(如視覺和光線)為車輛的ADAS網域控制站提供可用數據。 網域控制站是一個資訊處理中心,執行感測器資訊融合,以幫助安全引導車輛。 前置監視器用於車道偏離警告和物體檢測成像,而後置監視器可以根據需要提供反向和附加成像。 光探測和測距(LiDAR,LiDAR)系統將紅外(IR)光脈衝傳輸到目標(例如,另一輛車或停車場的牆壁),並根據光的傳播檢測返回光源的IR脈衝。速度用於計算光源和目標之間的距離。 使用詳細的參數,例如IR脈衝的長度和波長以及反射和返回到車輛中的IR檢測器/接收器所需的時間,可以計算IR照射物體的位置和相對運動。 不幸的是,車載雷射雷達系統的效能和有效性極易受到惡劣環境條件的影響,如雪、雨和霧。
車載雷達系統可以以雷射雷達系統的管道工作,但是毫米波頻率的雷達的相應波長較小。 車載雷達被指定用於某些特定的頻率範圍,如24、77和79 GHz。 這些頻帶已被一些標準組織準予使用,如美國聯邦通信委員會和歐洲電信標準研究所。
中不同類型的雷達感測器應用選擇電路資料7bbab2ef32f57d3b5c953.png")
現時,各種雷達被用作ADAS應用的一部分,FMCW訊號因其在量測多個目標的速度、距離和角度方面的有效性而被廣泛使用。 汽車雷達有時使用工作在24GHz頻帶的窄帶NB和超寬帶UWB設計。 24GHz窄帶車載雷達佔據24.05至24.25 GHz的200 MHz範圍,24GHz超寬帶雷達的總頻寬為5 GHz,從21.65 GHz至26.65 GHz。 窄帶24GHz車載雷達系統可以提供有效的短距離交通目標檢測,並用於盲點檢測等簡單功能。 超寬帶車輛雷達系統已應用於更高距離分辯率的功能,如自我調整巡航控制(ACC)、前向碰撞警告(FCW)和自動緊急制動系統(AEB)。
然而,隨著全球移動通信應用繼續消耗“較低”頻率的頻譜(包括24 GHz附件),車載雷達系統的頻率變得更高,可用的較短波長的毫米波頻譜成為選擇,頻率分別為77和79 GHz。 事實上,日本不再使用24千兆赫超寬帶車載雷達科技。 根據地區標準組織ETSI和FCC分別製定的時間表,它將在歐洲和美國逐步淘汰,取而代之的是更高頻的窄帶77GHz和超寬帶79GHz車載雷達系統。 77GHz和79GHz雷達將以某種形式用作自動駕駛汽車的功能模組。
資料要求
自動駕駛汽車將使用許多不同的電子技術來提供引導、控制和安全,包括使用光和電磁波的感測器。 毫米波頻率雷達廣泛使用的訊號頻率範圍和電路科技曾經被認為是獨特的、實驗性的,甚至只用於軍事目的。 毫米波雷達使用的新增是一種趨勢,越來越多的電子技術和電路被集成到機動車中,為駕駛員提供便利和支持,使車輛更安全,並使車主和操作員避免駕駛車輛。 從“任務”中解放出來。 商用機動車輛中高頻電子設備的使用甚至可能引發駕駛員和車輛之間的全新管道。 至少,毫米波雷達等科技的使用將改變“駕駛”機動車的定義。
這些車載毫米波雷達系統的設計通常從天線開始,天線通常是高性能印刷電路板(PCB)天線,安裝在不同的位置,通過發射和接收低功率毫米波訊號來探測或“照明”目標。 車輛的雷達和其他電子系統使用不同的方法來提供有關車輛周圍環境的資訊,供車輛周圍物體檢測和分類算灋使用。
車載雷達的訊號可以是脈衝或調製CW的形式。 車載雷達系統已經用於24GHz的盲點檢測有一段時間了。 然而,隨著時間的推移和無線通訊等其他功能的頻譜競爭加劇,車載雷達系統正朝著高頻方向發展,並縮小其頻寬,例如以77GHz為中心的1GHz寬帶和79GHz頻帶。
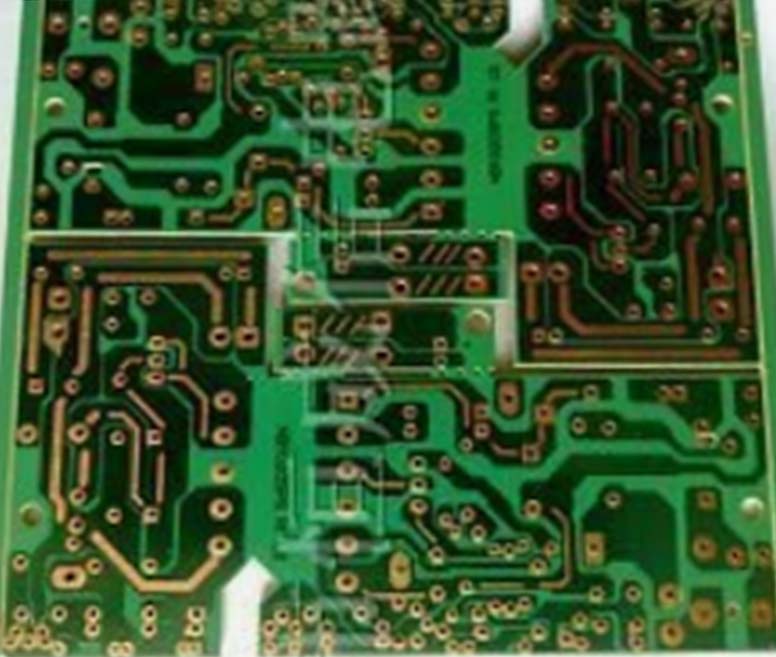
無論是在24、77還是79 GHz,PCB天線的效能對這些車載雷達系統至關重要。 如果目標是來自另一輛車的反射訊號,則它們需要向目標發射並幾乎即時接收。 PCB天線的關鍵性能參數包括增益、方向性和效率。 低損耗電路資料對於獲得良好的PCB天線效能至關重要(圖2)。 PCB天線的長期可靠性也非常重要,因為這些緊湊型天線及其高頻收發器電路也必須繼續不間斷地工作(當車輛運行時),並能够在更具挑戰性的操作環境中運行——商用機動車輛在頂部可靠地運行。